# Mapping trading to RL
- Environment: Market
- State:
- adjusted close/SMA (using close or SMA by itself however might not be a good choice)
- Bollinger band value
- P/E ratio
- whether we're holding stock
- return since entry
- Actions: Buy/Sell/Do Nothing
- Reward: Daily Returns (Better cause it is immediate reward), 0 until exit then cummulative return (Delayed reward)
# Markov Decision Problems
- Set of states (S)
- Set of actions (A)
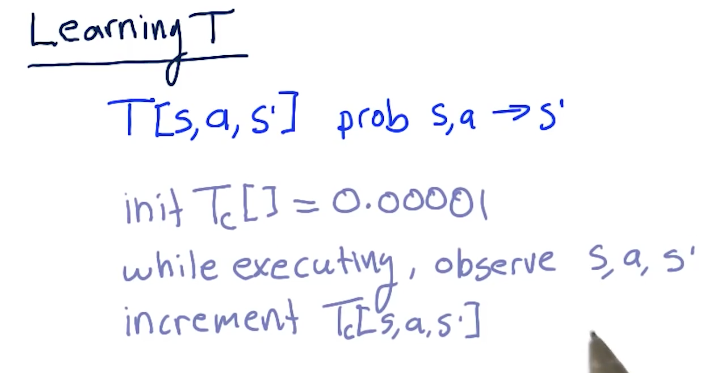
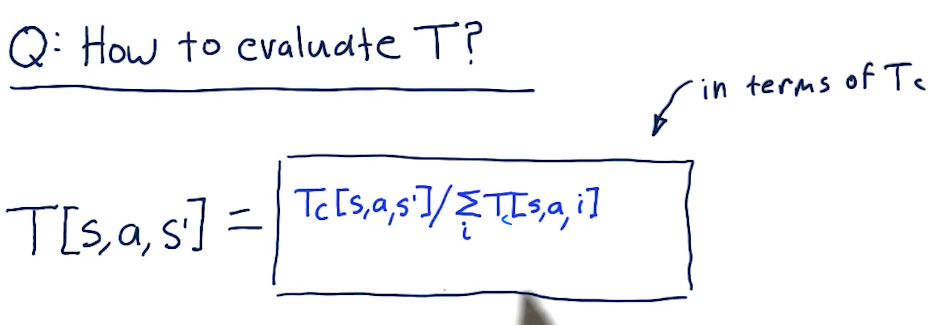
- Transition function (T) - [s, a, s']
- T is a three dimensional object and it records in each cell such that the probabibility if we are in state (s) and action (a), we will end up in state (s')
- Suppose we are in particular state (s) and take a particular action (a), the sum of all the next states we might end up in (the s's) 1.
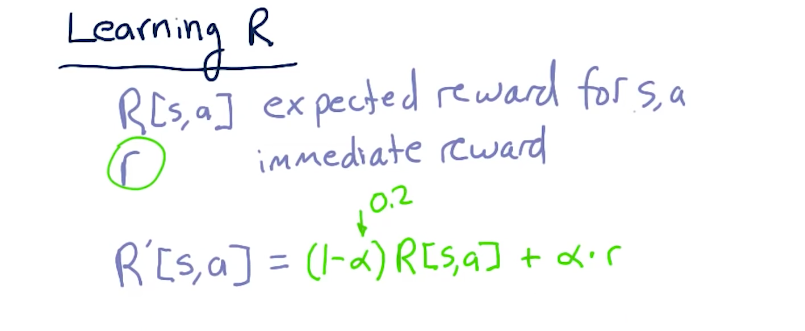
- Reward function (R) - [s, a]
- If we're in a particular state (s) and we take a particular action (a), we get a reward
- To Find: Policy (
(s)) that will maximize reward. If we get the optimal policy, we write it as (s)*
Policy iteration and Value iteration are algorithms that can be used to find the optimal policy.
For trading, since we do not have T amd R, we can't use these Policy iteration and value iteration.
# Uknown transitions and rewards
We collect experience tuples
<s1, a1, s1', r1>
<s2, a2, s2', r2>
...
The s1' is the new s2.
Once we gather a trail of experience tuples,
We can use them to compute the Policy
- Model based
- Build model of T
- Build model of R
- Then use value/policy iteration to find optimal policy
- Model free
- Q-learning
# What to optimize?
- Infinite horizon: You'll be collecting reward for infinite time
- Finite horizon: You'll be collecting rewaef for finite reward
- Discounted reward: Time Value of the same reward decreases over time

# Q-learning
First we have the Q-table
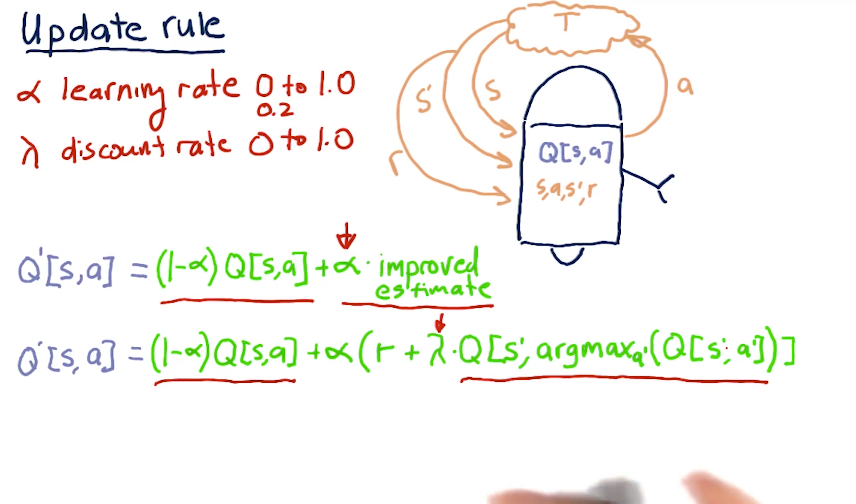
Q[s,a] = immediate reward + discounted reward
How to use Q?
# Learning Procedure
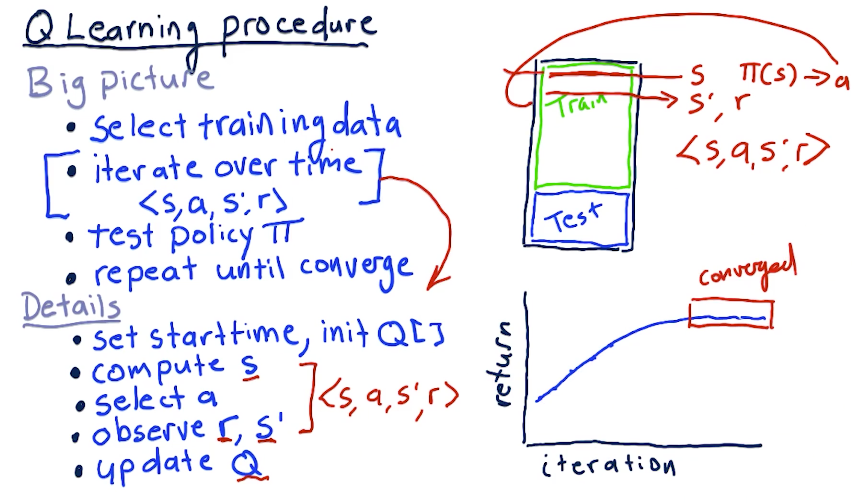
# Update Rule
# Finer Points
- Success depends on exploration
- Choose random action with probability c
- Coin Flip 1: Are we going to pick random action or action with best Q value?
- Coin Flip 2: Which of the random actions are we going to select?
- Picking 0.3 is considered a good value for c
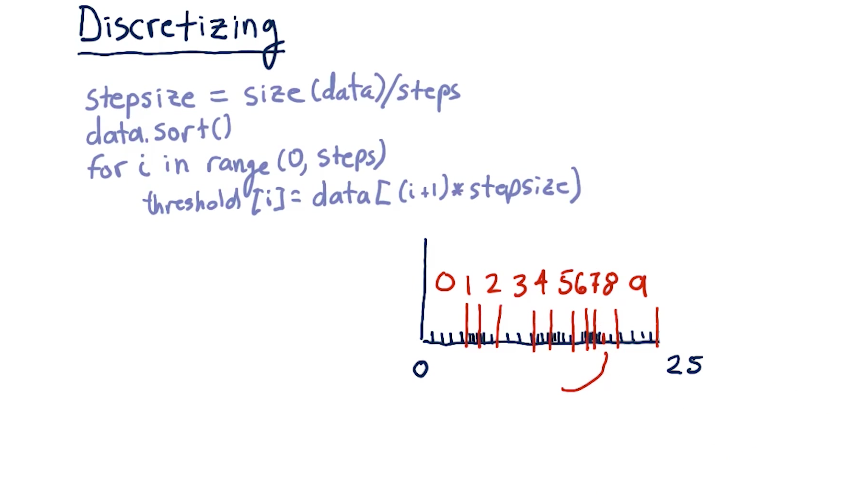
# Creating the state
- state is an integer
- discretize each factor
- combine each of multiple factors to one integer
- If the four factors return 0, 4, 2, 6, the single integer for state becomes 0426
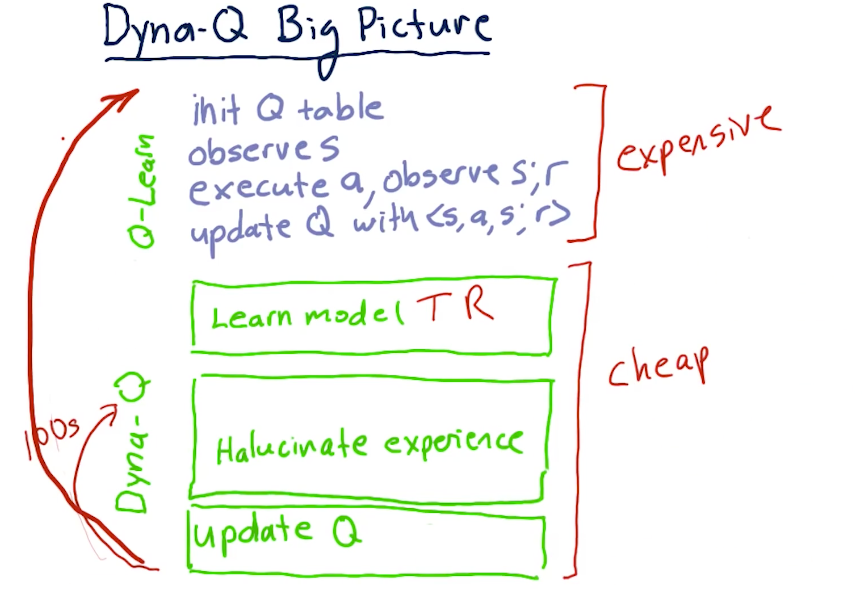
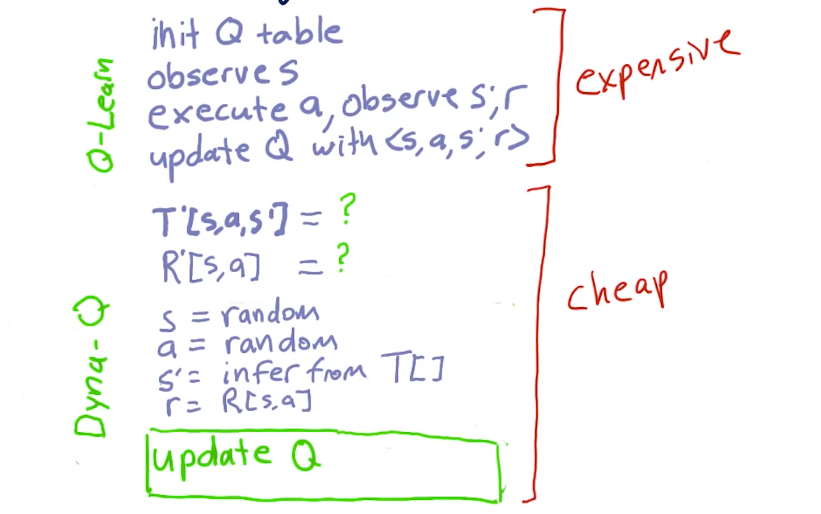
# Dyna
Blend of Model-based and Model-free learning.
Since Qlearning does not use T and R, Dyna allows Qlearning to do that.