# Acceleration
- With kinematic movement, velocity can change instantly.
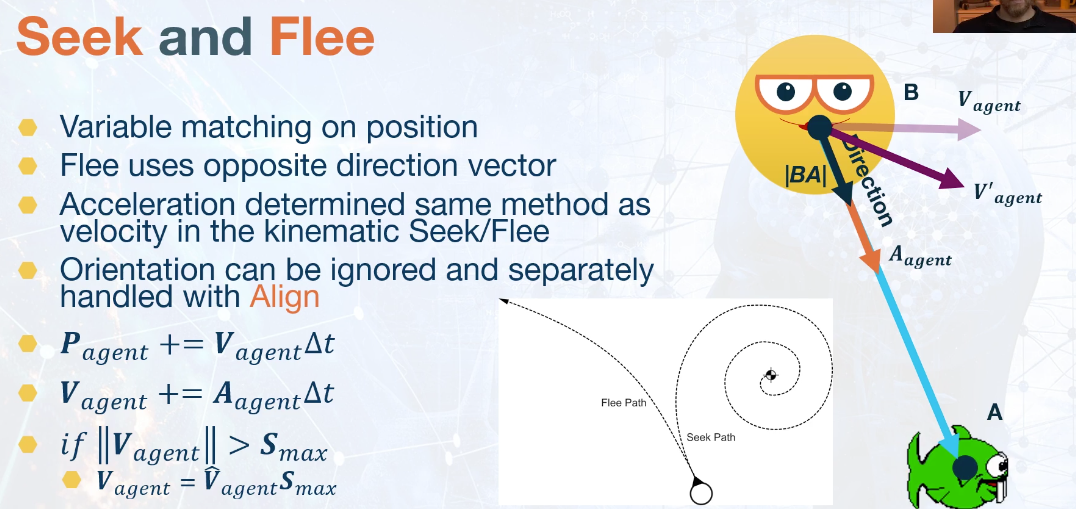
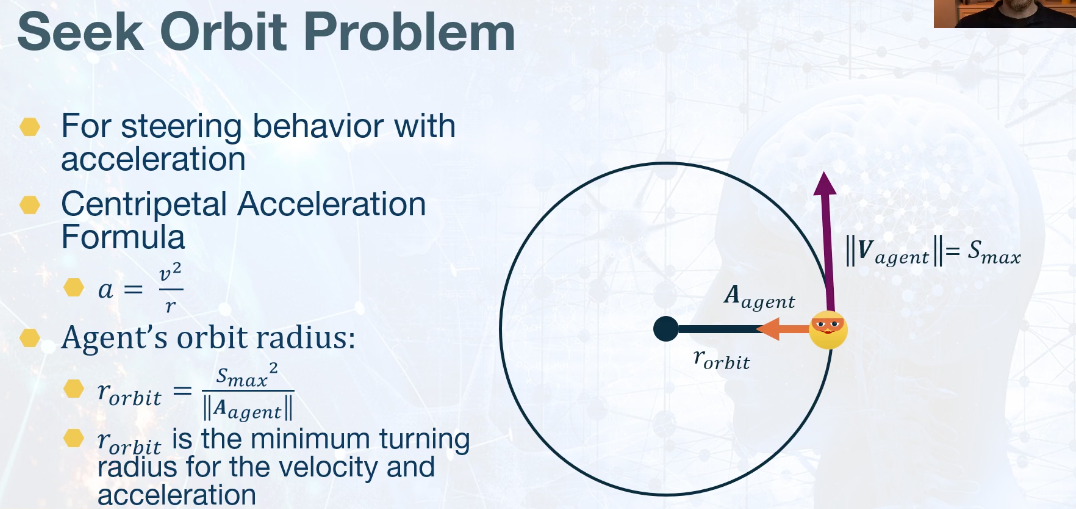
- The agent movement can look more natural with acceleration. This can be accomplished by generating a steering acceleration/force according to the desired location. Velocity is maintained as kinematic state (along with statics) and is updated according to the steering force calculated each frame.
- For any calculated acceleration, the current agent velocity is updated.
- This update likely won't orient the agent with the desired direction in a single frame, it will take multiple frames.
- Unbounded acceleration can lead to extreme velocities, so we can impose a speed limit.
- Instead of speed limit, drag can be used in games where agents are simulated by physics engine.
# Variable Matching
- With accelerating, one can consider objectives other than directing the agent to a target.
- For example, the agent could accelerate towards matching the target's velocity
- Possibilities for matching: position, velocity, orientation, angular velocity
- Also the opposite of matching can be considered, like maximizing the difference
Using all the following types of variable matching, steering behaviors can be created
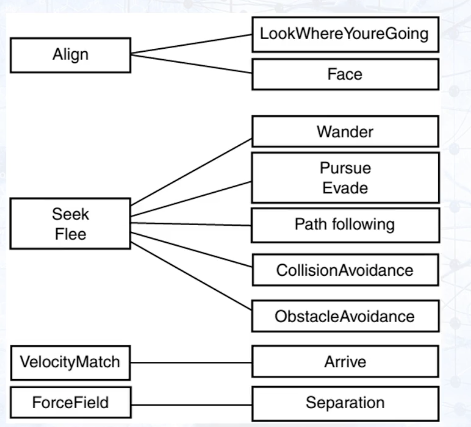
# Seek
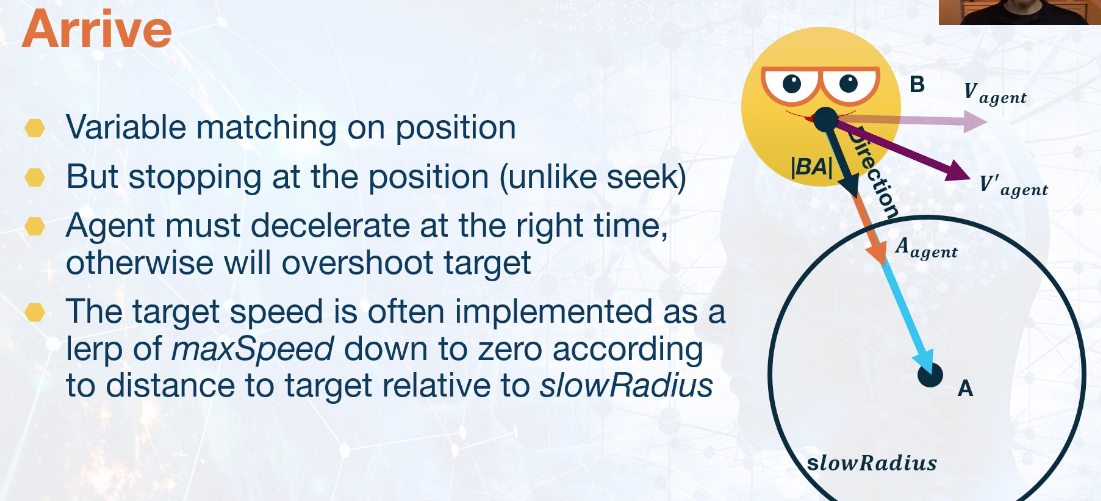
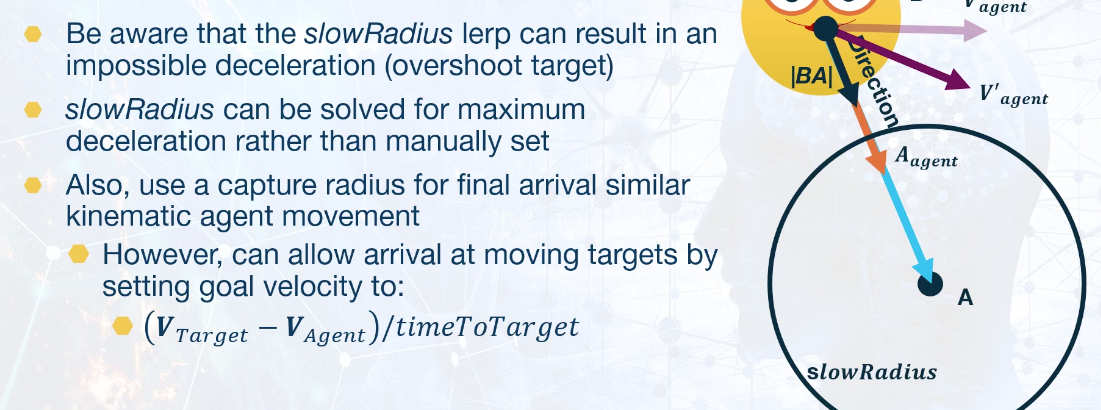
# Arrive
# Align
- Matching target's orientation
- Same basic algorithm as Arrive but working with orientation and angular velocities and acceleration
- Use a slow angle and a capture angle
- Angle are unique and must be mapped to a [-pi, pi] range relative to current facing angle. Turn in the shorter direction
# Velocity Matching
- Agent matches the velocity of the target
- Not especially useful on its own, but can be combined with other behaviors, like multi-agent flocking, group movement
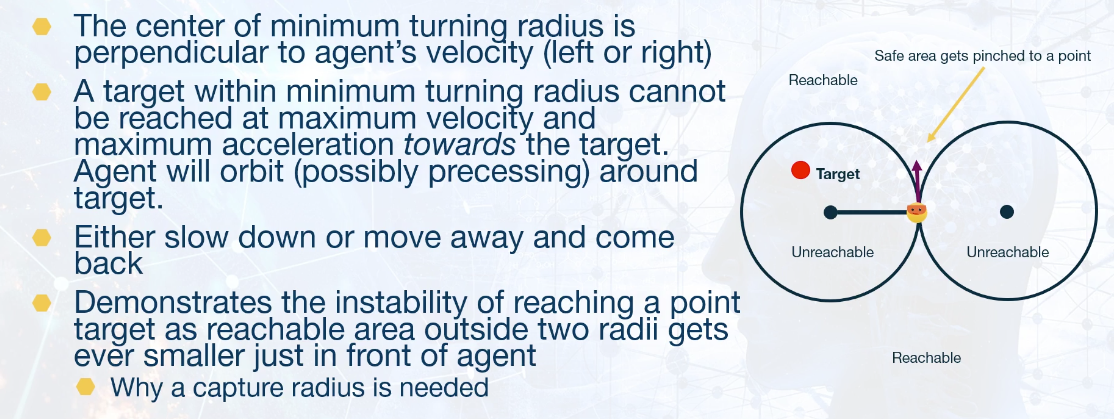
- Implementation is basically the capture radius from Arrive
- Acceleration is clipped to
# Turn-First Steering Behavior
- Orientation and the direction of velocity can be locked together
- One approach is for the agent's angular velocity to dictate direction of translation
- The main advantage is the agent won't ever appear to slide
# Basic approach
- Agent first attempts to align with relative vector to target (angular acceleration)
- Next, agent moves towards target
- Simplest case: agent always goes at full velocity (unless arriving or matching speeds)
- Problem: wide turns
# Advanced approach
Turn-induced deceleration and variable forward acceleration
Project previous frame's velocity vector onto new forward (orientation) vector
This deceleration is immediately applied as velocity change (due to turning)
But the agent also accelerates
Can always try to accelerate to max speed (unless arriving, etc)
Project the relative target unit vector scaled by max speed onto current velocity
- This is the target velocity to accelerator towards
- If negative direction, agent can even back up while turning
# Delegated Behaviors
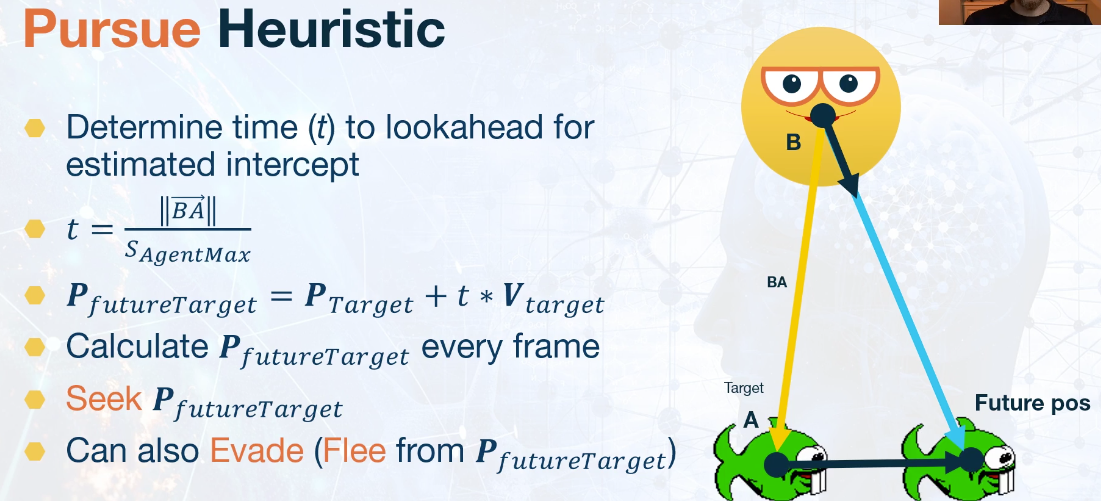
# Pursue
- Seek with prediction
- We can use a heuristic, doesn't have to be precise
- Must be efficient calc since it is done every frame
- Linear extrapolation assumption (zero acceleration/constant velocity)
# Prediction gotchas
- Watch out for extreme predictions (very large lookahead t values)
- Could send your agent off the map or result in odd behavior
- Consider clamping max time prediction (and even minimum)
- Consider clipping extrapolated future positions to fit on navmesh or map
- you can abandon certain predictions, like if the future position is on the edge since the target is bound to move away from there
# Face
- Align towards a position
- Determine a relative position vector to target for a direction
- Use
ATan2()to calculate goal orientation angle from x, y components of directions - Apply Align
# Look where going
- Align towards current velocity
- Apply in conjunction with other behaviors affecting velocity
- Same as Face but use the agent's linear velocity to determine orientation angle
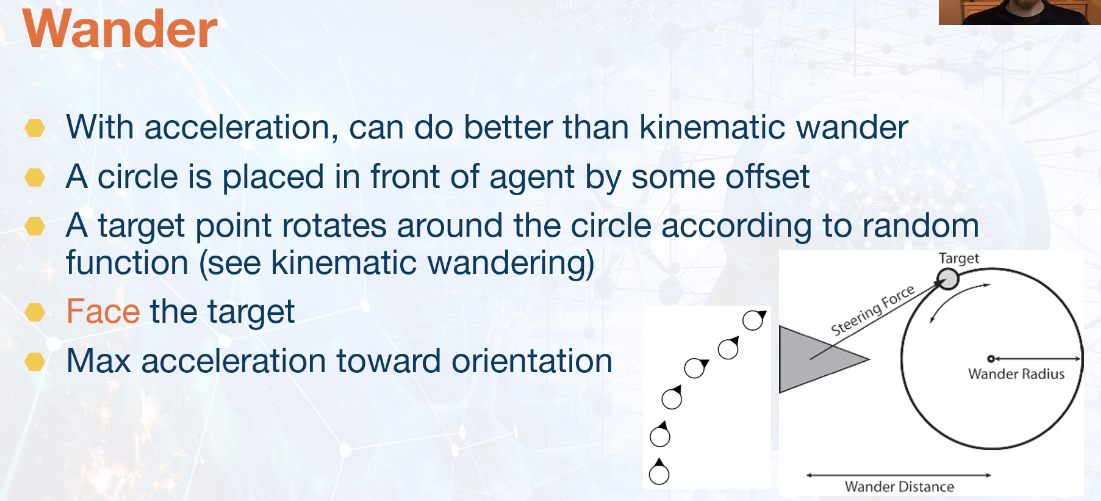
# Wander
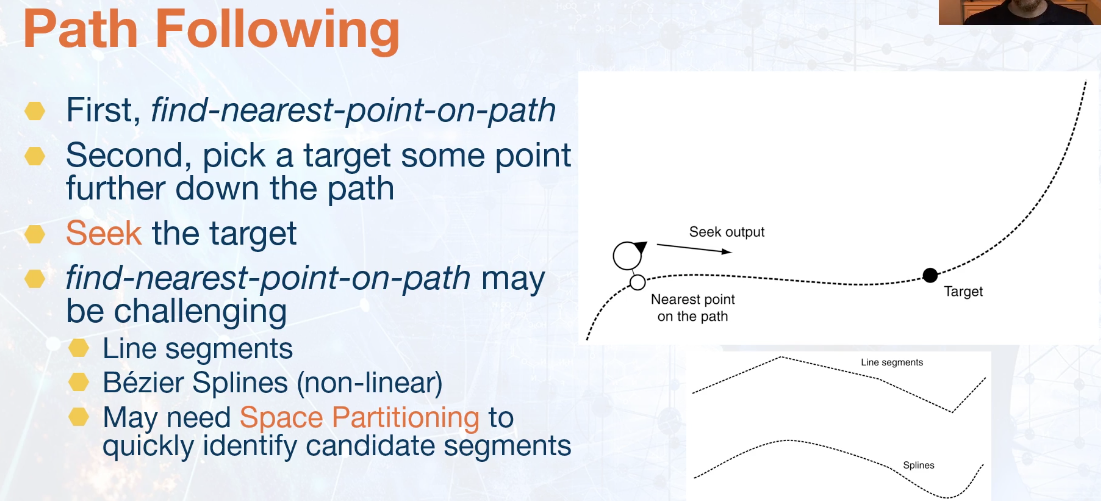
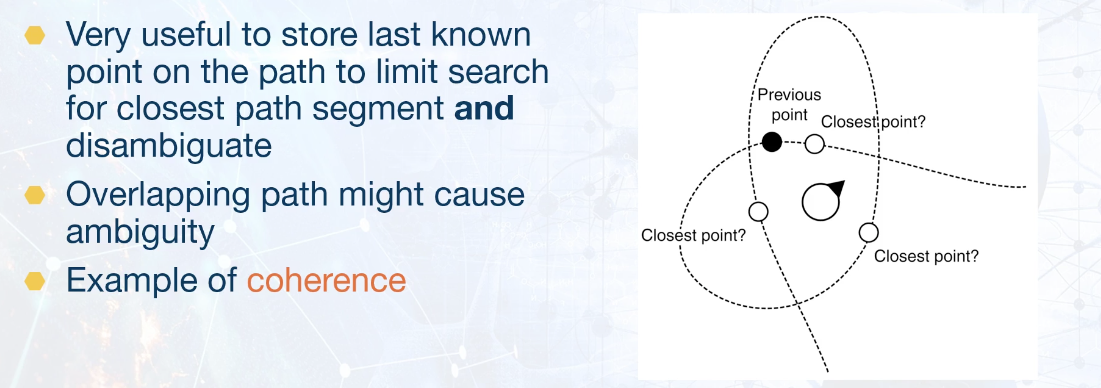
# Path Following
# Predictive Path Following
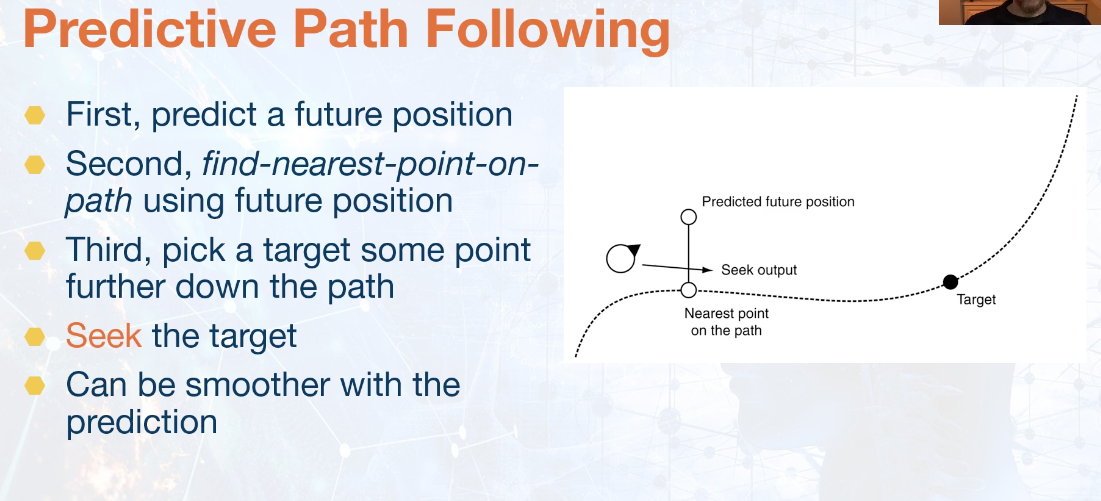
- One downside might be that the agent might cut corners if it has a winding corners. Therefore, this approach might not be ideal for guard patrols, races, etc
# Separation
Separate agents without fleeing forever
Good for crowd simulation (heading in same direction)
Only separate within some distance threshold
In a crowd, to calculate separation force: can separate from only the closest neighbor or sum of forces from nearby neighbors (clipped to
) Need
Space PartitioningandCoherenceto quickly identify neighbors
# Attraction
- Opposite of separation
- Not often useful. Mainly for group behaviors such as flocking
- Typical to use
with a negative k(constant of decay)
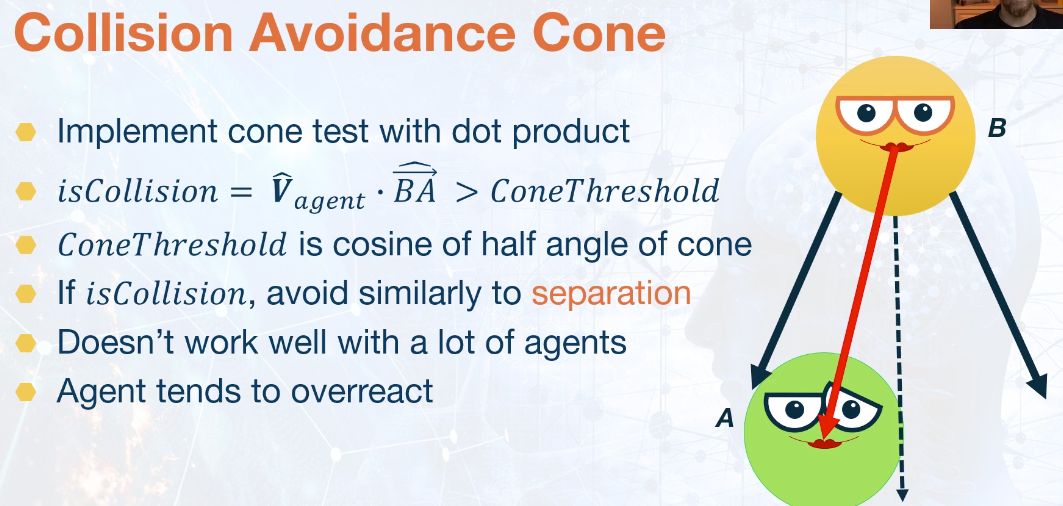
# Collision Avoidance
# Cone
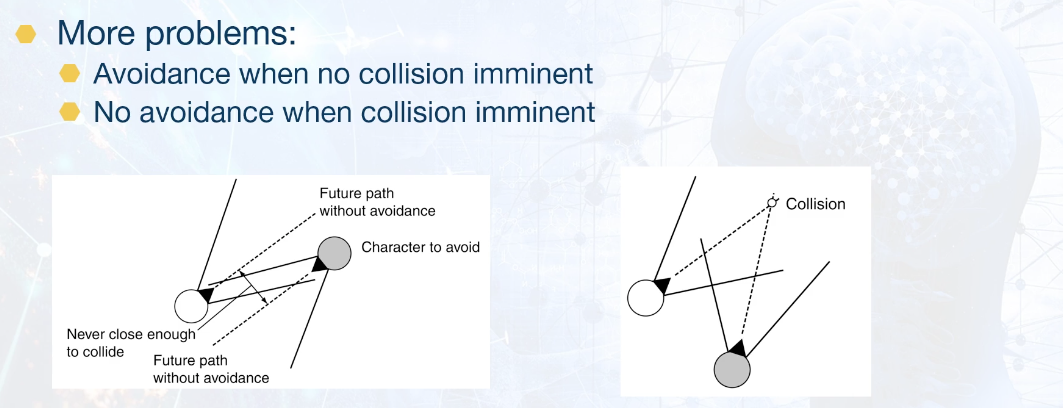
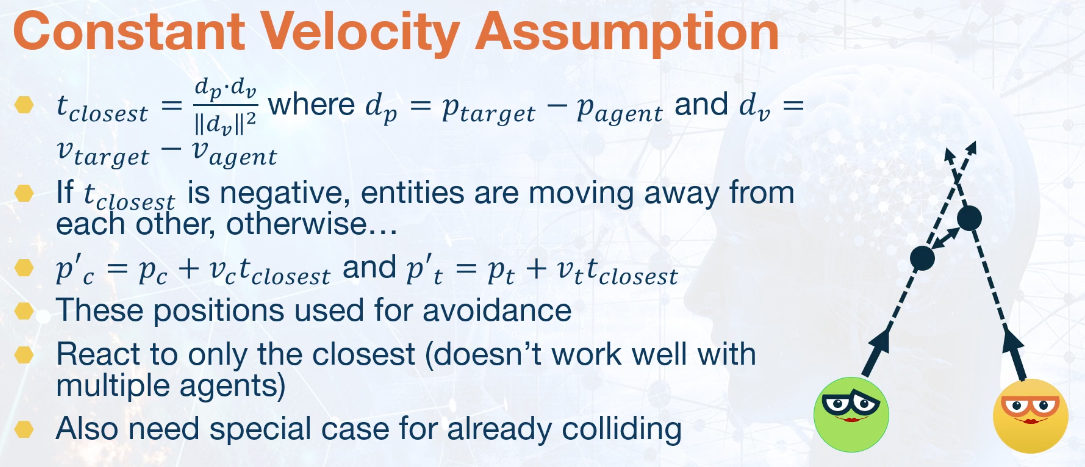
# Constant Velocity Assumption
- Points of closest approach
- Will be different than intersection of trajectories
- Due to differing speeds
- Find time (t) of closest approach
# Obstacle and Wall avoidance
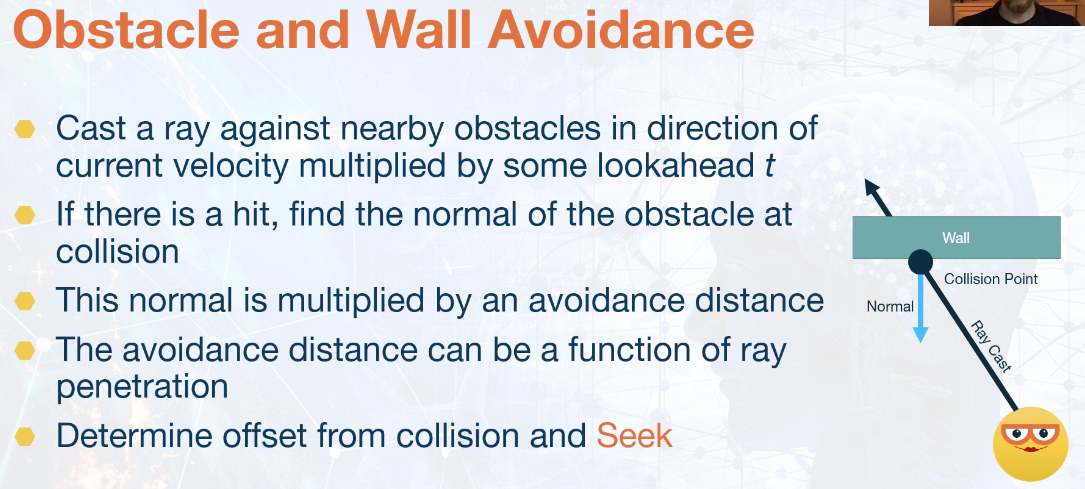

- Collision detection with physics engine support can be used but this is computationally expensive and difficult to interpret collisions and appropriate avoidance behavior.
# Blended Behaviors
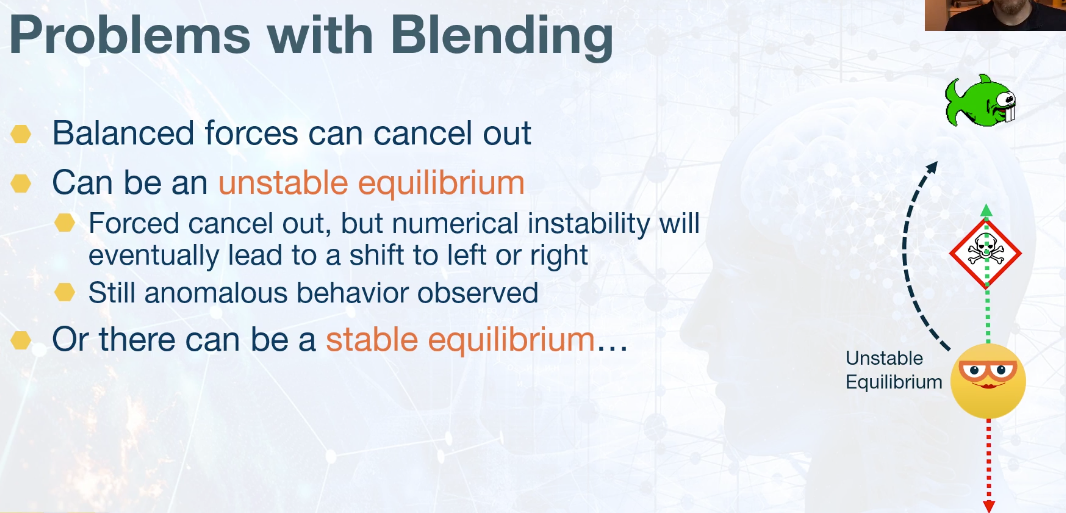
What if agent needs to steer towards a goal while also avoiding a danger? The solution is blending steering forces additively or arbitrate.
- Sum of forces
- Need to enforce max acceleration
- Weighted sum
- Each force has a weight that is multiplied by generated force
- Weights don't need to sum to 1.0 but we can normalize them
- Weights can be based on some metric like health, to favor one strategy over other
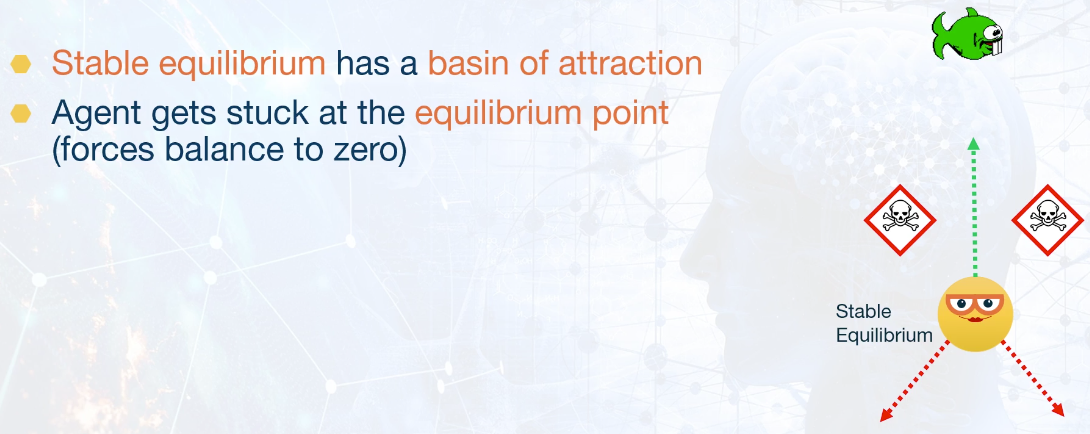
# Problems with blending
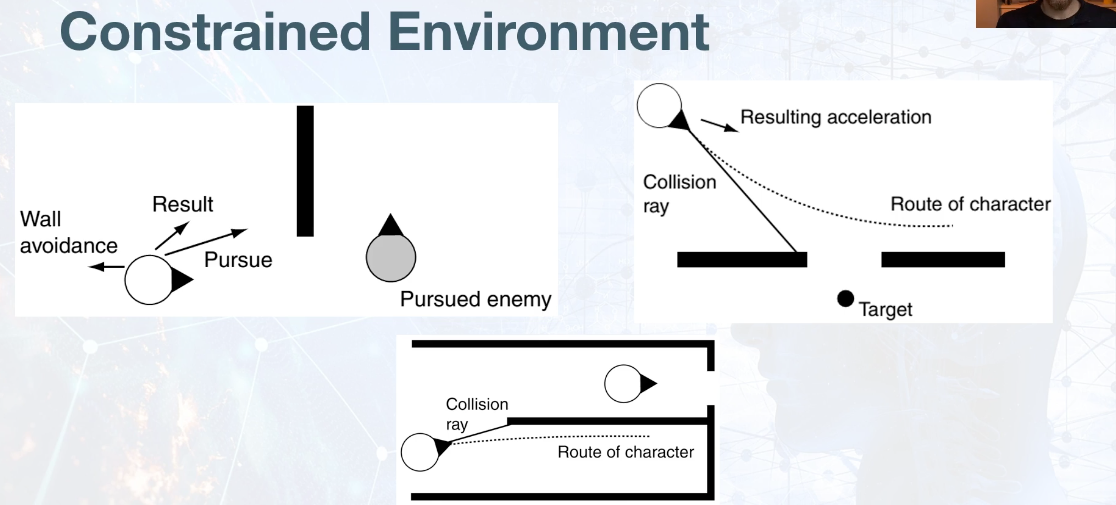
# Constrained environment
- Indoor environments, canyons, lots of agents can create constrained environments
- Constraints that lead to lots of steering forces can create obvious failures detrimental to the gameplay experience
- Steering behavior agents act most strongly to local influences. This creates near-sightedness which leads to failures.
# Solutions to blending problems
- Higher level planning
- Path planning
- Decision making, often reactive
# Priority Blending
Beginning to blur the lines between simple steering behaviors and integration of reactive decision making
Observation: Many of the steering behaviors we have seen only return a steering force in presence of a stimulus (e.g. obstacle avoidance). These forces are generally important (responding to imminent threats) but can become diluted than others.
With priority blending, we can prioritize steering behaviors that activate above a certain force threshold
Can be applied to a single steering behavior or a set (combination)
Can immediately avoid unstable equilibria and stable equilibira with a small enough basin of attraction
Constrained environments and large basins of attraction are still an issue
# Animation
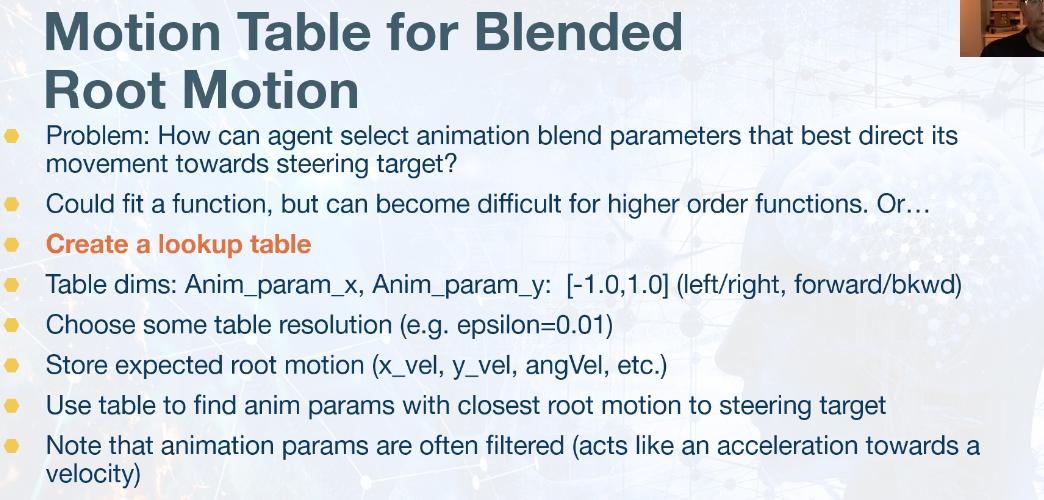
- Improvement: Add linear interpolation to table selection
- For any parameters looked up, find the closest cells
- Then perform a weighted average according to distance to each cell
# Applications
Unique agents can be authored by:
- Blending steering behaviors
- add small perturbations with wandering along with seeking
- use different params for prediction in pursue, obstacle avoidance, etc
- Defining a
performance envelope- Set unique max (angular) velocity, max (angular) acceleration
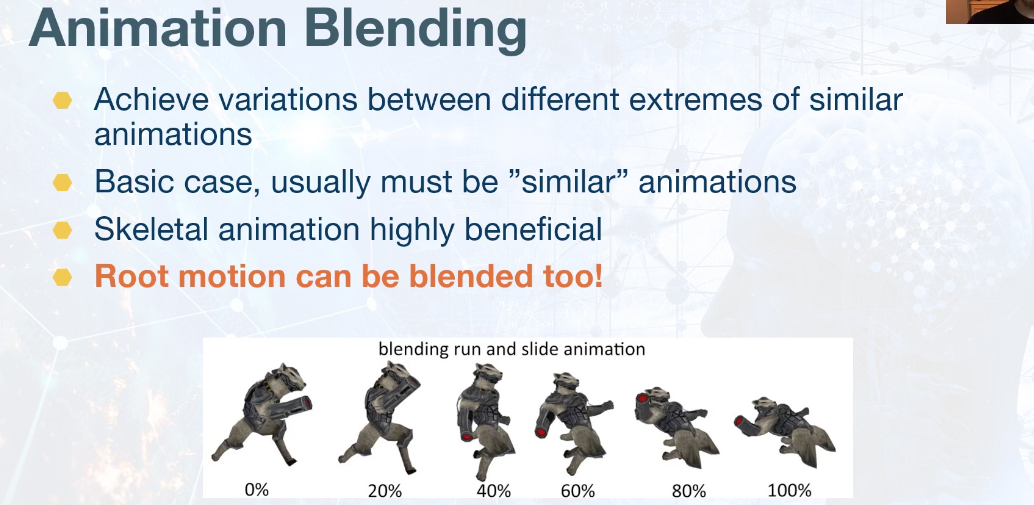
- Possibility driven by animation system (root motion)
Cool implementation: OpenSteer