# MDP
David Silver's RL Course Lecture 2 shows a really nice intuitive example of Markov Chain
# Discount Factor
The discount factor essentially determines how much the reinforcement learning agents cares about rewards in the distant future relative to those in the immediate future.
- If 𝛾=0, the agent will be completely myopic and only learn about actions that produce an immediate reward.
- If 𝛾=1, the agent will evaluate each of its actions based on the sum total of all of its future rewards.
Most Markov reward and decision processes are discounted. The reasons are:
- Mathematicaly convenient to discount rewards
- Avoid infinite returns in cyclic MDPs
- if the reward is financial, immediate rewards may earn more interest than delayed rewards
- Animal/human behavior shows preference for immediate reward
# Bellman Equation for MRPs
Expected Reward in current step = Immediate reward in next step + Expected reward in the next step

# Optimal Policy

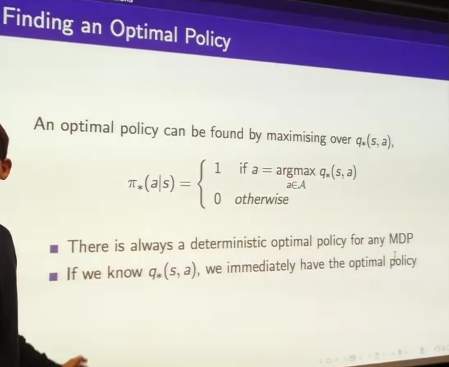
David explains this concept with an example in lecture 2 around 1:19:00
# Bellman Optimality Equation for Q*
This is the bellman equation version that is more commonly referenced, not the one above.
